Aula 7 — UART: Primeiros Bytes
Duração estimada: 30 minutos Bloco: 3 de 3 — Integração e preparação para UART
Objetivos
Ao final desta aula você será capaz de:
- Explicar o que é comunicação serial UART
- Entender por que o Wokwi exige uma configuração especial (loopback)
- Enviar e receber um byte entre duas UARTs num único ESP32
- Controlar um LED a partir de um byte recebido via UART
1. Conceito
O que é UART?
UART significa Universal Asynchronous Receiver/Transmitter — em português, Transmissor/Receptor Universal Assíncrono. É uma das formas mais antigas e simples de comunicação serial entre dispositivos.
A ideia é direta: em vez de enviar 8 bits ao mesmo tempo por 8 fios, a UART envia um bit de cada vez por um único fio, em sequência. O receptor reconstrói o byte original na outra ponta.
Transmissor Receptor
│ │
│ ── TX ──────────────── RX ──► │
│ ◄─ RX ──────────────── TX ── │
│ │
[envia bits] [reconstrói byte]
Dois fios de dados: TX (transmissão) e RX (recepção). A conexão é sempre em crossover: TX de um lado vai ao RX do outro.
Baud rate
A velocidade da UART é medida em baud — bits por segundo. Os dois lados precisam usar exatamente o mesmo valor, ou a comunicação falha. O valor mais comum em exemplos didáticos é 9600 bps.
O byte que você já conhece
Quando a UART recebe um byte, ele chega em MicroPython como um inteiro — o mesmo tipo que usamos nas aulas anteriores. Tudo que aprendemos sobre bits, máscaras e operadores continua válido aqui.
2. A limitação do Wokwi — e a solução
Leia com atenção antes de montar o circuito.
No ESP32, a UART0 é usada pelo Wokwi para o monitor serial (o terminal onde você vê os print()). Isso significa que ela não está disponível para comunicação entre dispositivos — qualquer tentativa de usá-la para outro fim causará conflito.
Solução adotada: loopback com UART1 e UART2
Usamos as outras duas UARTs disponíveis no ESP32 e as conectamos internamente por fios no próprio diagrama, simulando duas placas:
UART1 (transmissora) UART2 (receptora)
TX → GPIO 4 ──────────► GPIO 16 ← RX
RX → GPIO 5 ◄────────── GPIO 17 ← TX
A UART1 faz o papel do transmissor (quem envia o comando).
A UART2 faz o papel do receptor (quem executa a ação).
O monitor serial (UART0) continua disponível para os print().
Importante: nesta configuração, o método
.any()funciona normalmente para UART1 e UART2, pois não há conflito com o monitor serial. O conflito ocorre apenas quando se tenta usar UART0 para comunicação ao mesmo tempo em que o monitor serial está ativo.
Na aplicação real (duas placas físicas)
Com hardware real, cada placa tem sua própria UART0 disponível e não há conflito. O código pode usar uart.any() normalmente, e as placas se comunicam por fios TX→RX cruzados. Veja a seção 6 desta aula para o esquema de ligação física.
3. Circuito — Wokwi (loopback)
| Componente | Quantidade |
|---|---|
| ESP32 DevKit C V4 | 1 |
| LED vermelho | 1 |
| Resistor 330 Ω | 1 |
| Botão (pushbutton) | 1 |
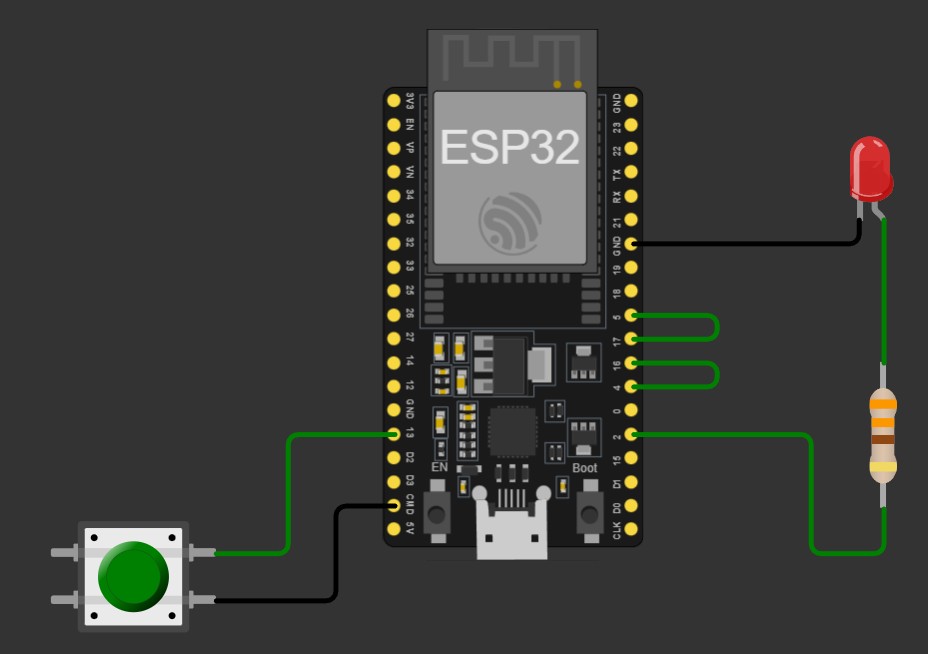
Conexões internas (fios no diagrama):
GPIO 4 (TX1) ──────► GPIO 16 (RX2) ← fio de dados TX→RX
GPIO 17 (TX2) ──────► GPIO 5 (RX1) ← fio de retorno (opcional)
GPIO 13 ──► Botão ──► GND (pull-up interno ativado no código)
GPIO 2 ──► R330 ──► LED ──► GND
O botão usa pull-up interno — sem resistor externo necessário.
Pin.PULL_UPgarante leitura1em repouso e0quando pressionado.
A imagem abaixo mostra o circuito montado com os fios de loopback em destaque:
4. Circuito Wokwi — diagram.json
Este circuito foi validado no Wokwi. Cole o conteúdo abaixo no arquivo
diagram.jsondo seu projeto.
{
"version": 1,
"author": "RMB - Mini Curso Embarcados — Aula 7",
"editor": "wokwi",
"parts": [
{
"type": "board-esp32-devkit-c-v4",
"id": "esp",
"top": 0,
"left": 0,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-led",
"id": "led1",
"top": 34.8,
"left": 176.6,
"attrs": { "color": "red", "flip": "" }
},
{
"type": "wokwi-pushbutton",
"id": "btn1",
"top": 198.2,
"left": -134.4,
"attrs": { "color": "green", "xray": "1" }
},
{
"type": "wokwi-resistor",
"id": "r1",
"top": 158.4,
"left": 172.25,
"rotate": 90,
"attrs": { "value": "330" }
}
],
"connections": [
[ "esp:TX", "$serialMonitor:RX", "", [] ],
[ "esp:RX", "$serialMonitor:TX", "", [] ],
[ "r1:1", "led1:A", "green", [ "v-19.2" ] ],
[ "btn1:2.r","esp:CMD", "black", [ "h48.2", "v-9.4" ] ],
[ "esp:4", "esp:16", "green", [ "h33.64", "v-9.6" ] ],
[ "esp:17", "esp:5", "green", [ "h33.64", "v-9.6" ] ],
[ "esp:13", "btn1:1.r", "green", [ "h-43.01", "v48" ] ],
[ "r1:2", "esp:2", "green", [ "v18", "h-29.35", "v-48" ] ],
[ "esp:GND.3","led1:C", "black", [ "h62.44", "h28.4" ] ]
],
"dependencies": {}
}
Link do projeto Wokwi validado: https://wokwi.com/projects/462409529242615809
5. Código — Wokwi (loopback)
# ============================================================
# Aula 7 — Loopback UART (simulação Wokwi)
#
# Simula comunicação entre duas UARTs em um único ESP32.
# UART1 (transmissora) envia bytes ao pressionar o botão.
# UART2 (receptora) lê os bytes e controla o LED.
#
# Conexão interna (fios no diagram.json):
# GPIO 4 (TX1) → GPIO 16 (RX2)
# GPIO 17 (TX2) → GPIO 5 (RX1)
#
# Protocolo simples:
# b'\x01' → acende LED
# b'\x00' → apaga LED
#
# Baud rate: 9600 bps
# ============================================================
from machine import UART, Pin # type: ignore[import]
import time
# --- configuração das UARTs ---
uart_tx = UART(1, baudrate=9600, tx=4, rx=5) # transmissora
uart_rx = UART(2, baudrate=9600, tx=17, rx=16) # receptora
# Pico: uart_tx = UART(1, baudrate=9600, tx=Pin(4), rx=Pin(5))
# Pico: uart_rx = UART(0, baudrate=9600, tx=Pin(0), rx=Pin(1))
# --- periféricos ---
botao = Pin(13, Pin.IN, Pin.PULL_UP) # pull-up interno: repouso = 1
led = Pin(2, Pin.OUT)
led.value(0)
# Pico: botao = Pin(14, Pin.IN, Pin.PULL_UP) | led = Pin(15, Pin.OUT)
# --- estado anterior do botão (detecção de borda) ---
estado_anterior = 1 # repouso com pull-up
print("Aula 7 — Loopback UART iniciado.")
print("Pressione o botão para acionar o LED via UART.")
# --- loop principal ---
while True:
# ── TRANSMISSORA: detecta mudança de estado do botão ──────────
estado_atual = botao.value()
if estado_atual != estado_anterior: # houve mudança?
estado_anterior = estado_atual
if estado_atual == 0: # botão pressionado
uart_tx.write(b'\x01') # envia byte LIGAR
print("[TX] Enviou 0x01 → LIGAR")
else: # botão solto
uart_tx.write(b'\x00') # envia byte DESLIGAR
print("[TX] Enviou 0x00 → DESLIGAR")
# ── RECEPTORA: lê byte e age ───────────────────────────────────
if uart_rx.any(): # há dado disponível?
dado = uart_rx.read(1) # lê 1 byte
if dado == b'\x01':
led.value(1)
print("[RX] Recebeu 0x01 → LED LIGADO")
elif dado == b'\x00':
led.value(0)
print("[RX] Recebeu 0x00 → LED DESLIGADO")
time.sleep(0.02) # cadência do loop
6. Aplicação real — duas placas físicas
Com duas placas ESP32 físicas, a UART0 de cada placa fica livre para comunicação. Conecte as placas com três fios:
Placa A (transmissora) Placa B (receptora)
TX (GPIO1) ──────────────► RX (GPIO3)
RX (GPIO3) ◄────────────── TX (GPIO1)
GND ────────────── GND ← obrigatório!
O GND compartilhado é indispensável. Sem ele, a referência de tensão entre as placas é indefinida e a comunicação falha.
Código — Placa A (transmissora):
from machine import UART, Pin
import time
uart = UART(0, baudrate=9600) # UART0 livre na placa física
botao = Pin(13, Pin.IN, Pin.PULL_UP)
estado_anterior = 1
print("Placa A — Transmissora pronta.")
while True:
estado_atual = botao.value()
if estado_atual != estado_anterior:
estado_anterior = estado_atual
if estado_atual == 0:
uart.write(b'\x01')
print("[TX] Enviou 0x01 → LIGAR")
else:
uart.write(b'\x00')
print("[TX] Enviou 0x00 → DESLIGAR")
time.sleep(0.02)
Código — Placa B (receptora):
from machine import UART, Pin
import time
uart = UART(0, baudrate=9600)
led = Pin(2, Pin.OUT)
led.value(0)
print("Placa B — Receptora pronta.")
while True:
if uart.any():
dado = uart.read(1)
if dado == b'\x01':
led.value(1)
print("[RX] LED LIGADO")
elif dado == b'\x00':
led.value(0)
print("[RX] LED DESLIGADO")
time.sleep(0.02)
Use o Thonny para gravar e executar os códigos nas duas placas. Execute primeiro a Placa B (receptora), depois a Placa A (transmissora).
7. Experimento
Execute o código de loopback no Wokwi e observe o terminal serial.
a) Pressione e solte o botão. Quantas linhas aparecem no terminal a cada ciclo completo?
b) Complete a tabela com o que você observou:
| Ação | Byte enviado (TX) | LED | Mensagem no terminal |
|---|---|---|---|
| Botão pressionado | ____ |
__ | _________ |
| Botão solto | ____ |
__ | _________ |
c) Por que o código detecta a mudança de estado do botão (estado_atual != estado_anterior) em vez de simplesmente ler botao.value() a cada iteração?
d) O botão usa Pin.PULL_UP. Isso significa que em repouso o pino lê 1. Por que então o código envia b'\x01' (LIGAR) quando estado_atual == 0?
e) Troque b'\x01' por b'\x02' no código e execute. O que acontece? Por quê?
8. Desafio
Desafio principal: adicione um segundo LED (GPIO 4) e expanda o protocolo:
| Byte | Ação |
|---|---|
0x01 |
Acende LED 1 |
0x00 |
Apaga LED 1 |
0x03 |
Acende LED 2 |
0x02 |
Apaga LED 2 |
led2 = Pin(4, Pin.OUT)
# dentro do bloco de recepção:
if dado == b'\x03':
led2.value(1)
print("[RX] LED2 LIGADO")
elif dado == b'\x02':
led2.value(0)
print("[RX] LED2 DESLIGADO")
Desafio bônus: use dois botões — um para cada LED. Quando o botão A for pressionado, envia o comando para LED1; quando o botão B for pressionado, envia para LED2.
Resumo da aula
- UART transmite um bit de cada vez pelo fio TX, reconstruindo o byte na entrada RX
- Transmissor e receptor devem usar o mesmo baud rate
- No Wokwi, UART0 é reservada ao monitor serial — use UART1 e UART2 em loopback
.any()verifica se há dados disponíveis sem bloquear o loop- Detecção de borda (
estado_atual != estado_anterior) evita envios repetidos - Na aplicação real com duas placas, GND compartilhado é obrigatório
| *← Aula 6 | Próxima → Aula 8: UART com Protocolo de Nibbles* |